skule.sormo.no
ORG NR 885 947 522
Dronefilmer
Mission med test av grimbal
Ny testflight med utprøving av gombal. Resultatet fortsatt ikke helt bra, landskapet skeivt og rotorblad vises. Burde hatt en ny gimbal der kamera er plassert lavere på dronen slik at ikke rotorene vises.
Dronen går på mission. I starten er det lagt inn et punkt for POI (Point-of-interest) mot bilen. Dronen dreier kamera mot dette punktet og går sidelengs mellom veipunktene med snuten rettet mot bilen under hele flyturN.
Det var en del vind denne dagen, så dronen kastet seg litt hit og dit i vinden.
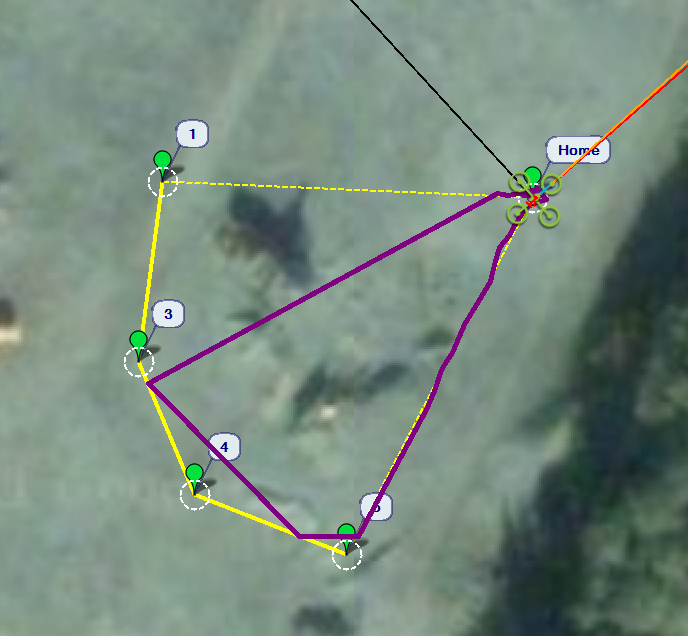
Mission planner: 5 veipunkt i 10 meters høyde. På veipunkt 1 settes POI til punkt 2. Kamera retter seg mot dette punktet.
Tracking på Google Earth. Den viser at dronen følger 10 meter over terrenget, unansett hvordan terrenget er. Kurven går over hauger, den stiger først, går over, og ned igjen.

Tracking fra selve dronen:
![]()
Telemetry logg, viser tracking, Noe av veien var uten forbindelse. Antenna var i bagasjerommet på bilen, og det gjorde kanskje at den ble for mye skjermet: